
I needed a vacuum cleaner motor for use in propulsion experiments involving high speeds (RPMs). Vacuum cleaner motors can typically do 10,000 RPM with plenty of torque. So I purchased one brand new ($150 CDN). It is an AMETEK Lamb Electric Division part number 315923. It is a 120 volt motor, 50/60Hz AC or it can be 120 volt DC (since it can do either AC or DC it is refered to as a universal motor). At maximum speed (and hense maximum voltage) the motor pulls 11.X amps (I don't recall the value of X). I could have gone with a smaller, cheaper one but I wanted the longer shaft that this one has. The really nice thing is that the shaft is threaded at the end, making it easy to attach things to it. It is variable speed if controlled by a variac or speed control.
|
|


This vacumm cleaner motors sucks air in from the shaft area and down through the body of the motor. That's how it cools itself. For propulsion experiments this is an issue as this airflow can distort results. This can be solved by putting the motor and device under test completely in an airtight box. That box then becomes the thing you put on a scale or balance. Since no flowing air can get out, this airflow will not be a factor.
Vacuum cleaner motors have a lot of torque so you'll want to slowly bring it up to speed. This can be done using a variac or speed control.
Working with high rotation speeds is dangerous! If parts come off of your device they will fly at deadly speeds. Always be completely behind a protective barrier or in another room altogether (maybe with a camera and TV monitor setup) when the motor is spinning something at high speed.
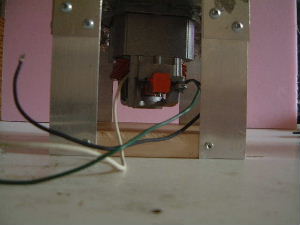
To expose more of the shaft I had to remove some of the fan layers on top (pictures below). This motor had three fan layers for sucking in air. The layer closest to the end of the shaft was a rotating. The next layer was a nonrotating one. And the last layer was a rotating one. I removed the first and second fan layers so that I could expose more of the shaft for my use. As of this writing I still have the third, rotating fan layer so that it can cool the motor. I may or may not take it off later and either always run the motor for short enough periods of time so that it does not heat up or have a separate cooling fan.
|
|


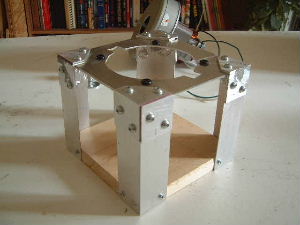
I needed a strong but lightweight supporting structure for my vacuum cleaner motor so I built one. Pictures follow.
|
|


|

The following is the first supporting structure I made. It is all metal. The problem with this was that some experiments involved high voltages or had moving magnetic fields that could induce eddy currents so I made the above one with less metal.
|
| ||
|
|


|

